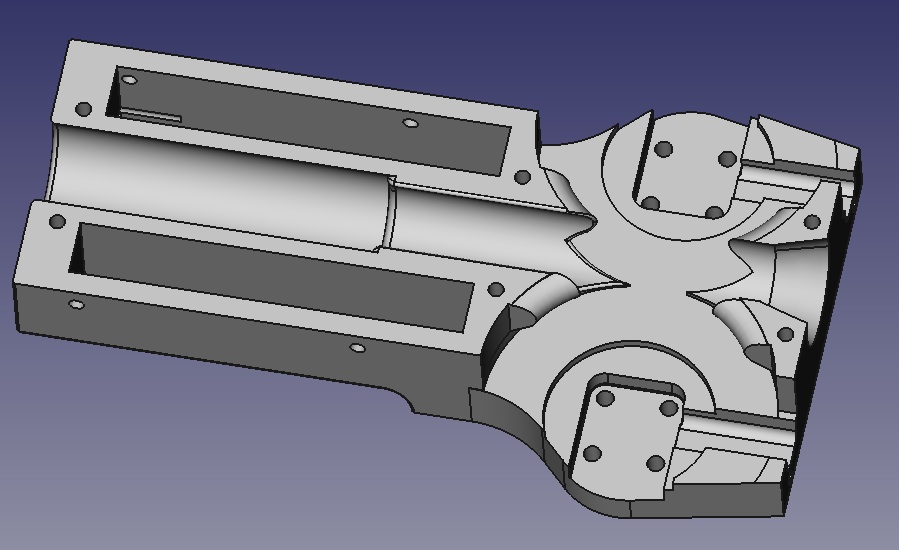
T19_FullLengthBreech_Gen2
A redesigned full length breech. Accepts most if not all superstock standard full length (12.7x72mm) magazines.


Uses the same T19_FullLengthMagRelease and T19_ControllerCovers as the original style breeches did. Uses the same hardware:
- 4 * 6-32 x 1" SHCS (Controller covers, top)
- 2 * 6-32 x 5/8" SHCS (Controller covers, bottom)
- 4 * 6-32 x 5/8" or 3/4" SHCS (Cage module to front flange)
- 2 * 6-32 x 3/4" SHCS (Rear flange to drive cover)
- 2 * 6-32 x 5/8" SHCS (Rear flange to drive housing, center 2 holes)
- 2 * 6-32 x 1/2" SHCS (Rear flange to drive housing, lower 2 bolts)
- 1 * 6-32 x 2" SHCS (Mag release pivot; shortened)
- 3 * 6-32 x 1/2" SHCS (Top rails to breech)


The old stock-blaster-style overinsertion stop methodology using the external ridge on mag bodies is eliminated and the overinsertion stop function is provided using the top of the feed lips as with the short dart breech. Accordingly, the magwell can now be angle-cut for aesthetics and ease of loading, and flared for ease of loading, as is the case with the short breech. Original full length magwell dimensions are retained. The fit is intentionally loose on many mags as it was before, for drop-free handling with most mags, and compatibility reasons, due to the large tolerances of this mag format.

The mag is now slightly further from the cage. The thin front wall is no longer so thin behind the cage flange. This allows a compound pre-ramp.
The thicker wall with ramp also prints cleaner and reduces the risk of burrs in this critical area.
The front halfpipe's edges have received a larger radius than the previous design and the oncoming lower edges meeting up with the mag body are now at an oblique angle to reduce the presentation of any sharp or tangential oncoming edge/surface at the advancing rounds.

Similarly, the rear of the feed path has received particular attention.
During the feeding process, the last event that must occur within a fraction of one cycle time as the bolt fully opens and clears the mag is that the rear of the topmost round (which was just being held down by the bolt) must rise up and seat in front of the boltface, ready to be pushed forward. If it bounces or snags slightly on anything, the bolt could contact it in the wrong position or miss and pass over it entirely.
As such similar to the front halfpipe, this now presents an oblique ramp but due to the even greater importance of this area (whereas the front of the dart has a much greater time to seat), it is compound.
Note that the sharp edge of the halfpipe end is so because it is a trailing edge.
Trivia: The caliber name 12.7x72mm Hassenfeld is a nod/acknowledgement to the Hassenfeld Brothers, founders of a like-named company, which would eventually go on to pioneer this caliber in 2005.
T19_TopRail_NewFullLengthRearSeg

The top rail rear segment for use with the Gen2 12.7x72mm breech, which is slightly longer than the old. Not much to see here.

Hy-Con-Delta_Main_iFlightXE_9.0_ready;
Hy-Con-Delta_Main_iFlightXE_9.5_only;
Hy-Con-GammaMajor_Main_iFlightXE_9.0_ready;
Hy-Con-GammaMajor_Main_iFlightXE_9.5_only
Hy-Con cage mains for iFlight Xing-E 2207 and 2306 motors. The same cage main supports both 2207 and 2306 variants. Only the flywheels differ between the two.
These motors have open stator bases and 16x16mm mounting patterns. They have no shaft end protrusion beyond the mounting plane and require no clearance pocket under the bearing, which is deeply recessed.
Fasteners for motor mounting are M3 x 10mm button head; shared with Turnigy cages.

The 9.5_only variants have the traditional Hy-Con groove filler geometry. They suit the traditional 9.5mm gap flywheels.
The 9.0_ready variants have slightly shaved groove fillers in order to restore safe clearance to the wheel profile with the 9.0mm wheels in the next section:

This modification by all means should be appropriate to use with any wheels, including 9.5mm and any larger special-application wheel - due to the radius on the filler edges in the original 9.5-minimum cages - geometry which is still the same and in the same place, only truncated a bit - this trim has very little impact on what is actually presented to the dart edgewise. I include the classical untrimmed version only as a matter of course and backup measure should any gremlins be discovered by anyone.
Also, there is no corresponding set of covers (or shaft end plugs) for these mains - they use the existing Racerstar BR2207S covers and plugs. This will very likely be the case in the future as well; most motors will be suited by either the Emax or the Racerstar cover/plug set. The Racerstar cover parts are universal to all presently supported motors and technically everything else could be deprecated.
The final little gotcha is an iFlight thing - iFlight has two main lines of motors, one of which is our relevant Xing-E. There are also a (just) Xing 2207 and Xing 2306 (without the -E). Those will NOT work. Those, in fact, are completely useless to me, because they use a novel "unibell" construction for the rotor and for aesthetic reason the outside of the rotor is not cylindrical thus I can't mount an OD-centric wheel on them. What we need here is the Xing-E, which is iFlight's slightly cost-reduced version with traditional rotor construction.
Hy-Con_iFlight_XingE_2207_9.0;
Hy-Con_iFlight_XingE_2207_9.5;
Hy-Con_iFlight_XingE_2306_9.0;
Hy-Con_iFlight_XingE_2306_9.5
Flywheels for these motors and cage parts. Print normally for Hy-Con flywheels i.e. 0.1mm layer height with optional 0.2 first layer height, 3 perimeters at 0.45mm or similar EW, rectilinear solid fill, 20% haxagonal infill, 8 bottoms 8 tops, random start/seam position. Nice and slow and clean, and get good fusion, and as always, whatever you do, don't underextrude. N.b.: Rotor OD fit may need tweaking for high thermal expansion non-PET materials such as ABS as always.

The 9.0mm gap option is the big exciting new thing aside from the 2 new extra-grunty motors - this is still semi-experimental, but is worth a bit more zip. I have, with the appropriate speed settings (remember to check maxRPM in any existing S-Core build as more than 25.5k will be required to reach critical with these on new ammo), seen 5-10fps more with used ammo and shot around 200fps with new ammo. Use only in concert with the 9.0_ready cage mains to ensure safe clearances! I have not seen many ill effects on accuracy nor dart decapitation rate, after a proper break-in period has been completed, and transfer layer has been established and stabilized.

The 2207 is a fairly long motor. Its corresponding wheel has 1.0mm of extra web offset and is 15mm thick, similar to the Racerstar BR2207S wheel.
In the future, this same or a similar wheel may be used to support the 2208 version of this motor in combination with a specific cage main with a circa 1mm greater mount offset; or else the 2208 may get its own +~2mm web offset wheel and possibly a slightly clearanced application specific cage cover.

Aligning the rotor keys on these is a bit of a pain in the ass, unfortunately. Also, the rotor OD press fits are intentionally tight and the 2306 version especially is gorilla tight, so scrape/sand/deblip/destring the bore beforehand and be prepared, it's not SUPPOSED to slide on easily, it is supposed to be an interference fit. Do not thrust load the bearings, do not dare TOUCH that stator base when forcing the wheel on! It is often apt to use the shaft nut to help cinch it up the last few mm, but if it doesn't want to seat, do NOT keep cranking on it - check the key orientation and try again.
Below image shows how much the edge of the rotor backiron should be protruding on a fully seated wheel, by the way. Not much - about a mm, maybe a little less.

Effort and care building a Hy-Con system will be rewarded with a long-term reliable rotating assembly you will never need to mess with ever again for as long as the motor and its bearings keep on chooching, something which those other blasters don't fully achieve.
The motors are each available in 3 winds - the one appropriate for typical 4S (or 5S, or 12-16 cell NiMH, 5/6S LiFePO4, etc.) setups is the 2450kv. The 2750 would be ideal for (yes, I hear you; upcoming) multistage cages on 4S, and the lowest kv wind for high bus voltage (6S) single stage builds. As always, although kv and battery voltage have nothing to do with speed in closed-loop situations and you CAN use any combo capable of reaching the full range of speed setpoints you are using without running out of voltage command, using a needlessly high kv motor results in a less efficient system operating point and will only get you less torque, worse spinups, less battery life and hotter motors and inverters. More kv is not better.
Hy-Con_iFlightXE_ShaftWasher
Pretty self-explanatory - as with other threaded shaft motors optioned on the Hy-Con system, these motor/wheel combos have their own correct-thickness shaft washer to both take up unthreaded extra shaft length and to spread the clamping load.

Print any ways you like as long as it's got random starts and ends up 100% solid.
Be sure to check out the previous post back, on the build that validated all this stuff...

As usual, it was a super satisfying one to put together, and it feeds like clockwork and shoots lasers. Full length life!





































